Der Prototyp eines adaptiven Trägers wurde im Rahmen des Forschungsgebietes "Adaptive Systeme" entworfen und entwickelt. Mit ihm sollte das Forschungsgebiet einer breiteren Öffentlichkeit im Rahmen der Swissbau 2002
in Basel vorgestellt werden.
Die Forschung im Bereich der adaptiven Tragwerke befasst sich mit der Integration von aktiven Elementen in Tragwerken, um deren inneren Beanspruchungszustand oder deren äußere Beanspruchungen zu manipulieren
bzw. zu optimieren. Hierbei ergeben sich große Optimierungspotentiale hinsichtlich dem Eigengewicht der Konstruktionen, dem Verformungs- oder Schwingungsverhalten. Anhand dieses adaptiven Trägers sollen mit einem relativ einfachen Tragwerk die Möglichkeiten durch die Einführung der Adaptivität veranschaulicht werden.
Für die Adaption des inneren Beanspruchungszustandes sind mehrere Zielgrößen denkbar: Die Anpassung der Schnittgrößen, der Schwingungen oder auch der Verformungen. Bereits bei den ersten Vorüberlegungen wurde eine Adaption der Verformungen für Präsentationszwecke als geeignet angesehen. Die Adaption der Verformungen ist bereits beim Hinschauen erkennbar und erfordert demnach im Gegensatz zu Adaptionen der Schnittgrößen keine weiteren technischen Hilfsmittel zur Visualisierung. Als einwirkende Größe wird eine fahrende Last gewählt. Diese ermöglicht eine gleichmäßige Wiederholung des Adaptionsvorganges, die für eine Präsentation erforderlich ist. Ziel der Adaption ist die Eliminierung der Vertikalverschiebung unterhalb der Last, d. h. die Last soll sich auf einer horizontalen Linie bewegen.
Zur Umsetzung dieses Prinzips wurde das unten abgebildete Tragwerksystem gewählt:
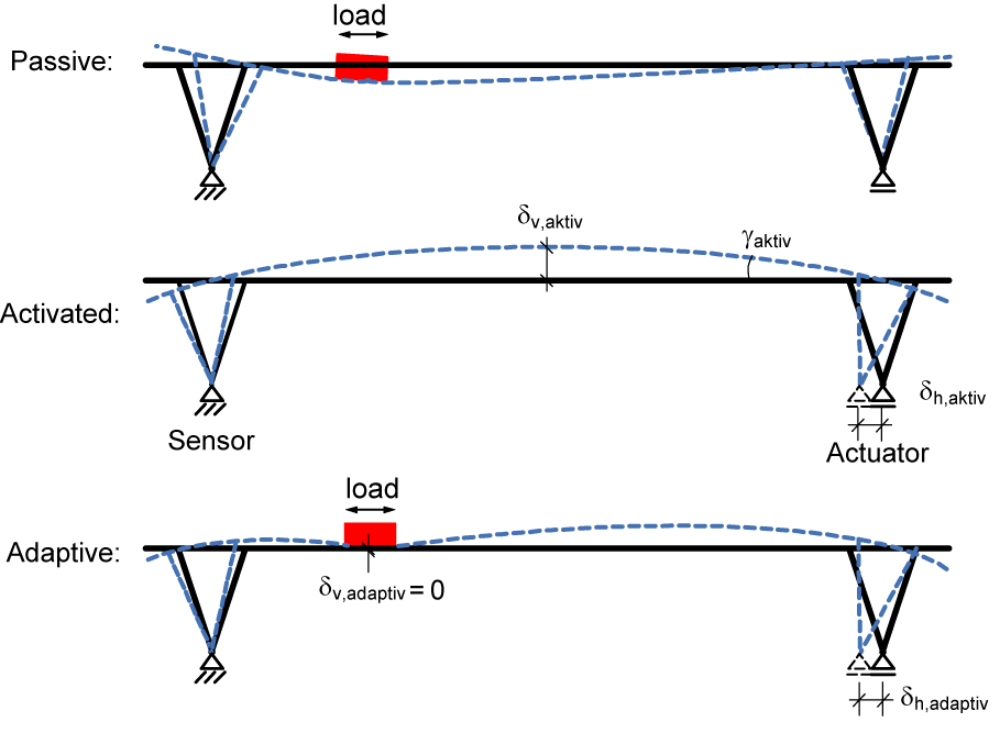
Das System zeichnet sich durch eine klare Struktur aus und bei diesem beeinflusst der Aktuator (horizontale Verschiebung des rechten Lagers) den Sensor (vertikale Auflagerkraft am linken Lager) nicht. Somit kann ohne größeren Programmieraufwand durch die Messung der Auflagerkraft am unverschieblichen Lager die Lage der beweglichen Last ermittelt werden. Die Abmessungen des System wurden aus Transportgründen auf eine Länge von 2.0 m begrenzt. Bei der gewählten Höhe von 10 cm der V-Stützen und einem Abstand von 1.60 m der Lagerpunkte ergibt sich eine aufzubringende Kraft am aktiven horizontalen Lager, die ca. der Hälfte der vertikalen Last entspricht.
Realisierung
Für den Träger wurde ein Aluminiumblech mit einer Breite von 40 mm und einer Dicke von 3 mm gewählt, wodurch eine Schlankheit von LI 500 erreicht wird. Bei diesen Abmessungen ergaben sich für den Träger unter der fahrenden Last im passiven Zustand des Systems deutlich sichtbare Verformungen von 35mm. Eine weitere Reduzierung des Trägerquerschnitts war aufgrund der sonst auftretenden Schwingungen hier nicht empfehlenswert. Die Auflager wurden als V-Stützen ausgebildet, um eine Einspannung des Trägers an den Feldenden zu erreichen. Auf der einen Seite ist die V-Stütze vertikal und horizontal unverschieblich auf dem Schlitten der Linearachse befestigt. Auf der anderen Seite wurde die V-Stütze auf der Wägezelle vertikal aufgelegt. Um die Messung der Auflagerkraft in der Wägezelle nicht zu beeinflussen, war es erforderlich die horizontale Lagerung reibungsfrei auszubilden. Da ein Druckklotz mit einer Teflongleitbeschichtung die vertikale Auflagerkraft noch zu stark beeinflusst hat, wird als horizontales Lager ein Zugstab an der V-Stütze befestigt, der in 20 cm Entfernung zum Auflager horizontal gehalten wird.
Bewegliche Last
Für die fahrende Last erwies sich eine Modelllokomotive als effektive Lösung. Der Antrieb erfolgt über den Strom der Schienen, und somit ist kein Akkubetrieb erforderlich, der bei längeren Präsentationen zu einem Problem werden kann. Die Stromzufuhr für die Lokomotive wurde ebenso in die Steuerung integriert. Hierfür wurden an den Trägerenden Lichtschranken in den Träger eingelassen, deren Signal die Umschaltung der Stromrichtung und somit der Fahrtrichtung auslöst.
Sensor
Als Sensor zur Ermittlung der Lastlage wird, wie oben beschrieben, ein Kraftaufnehmer zur Messung der vertikalen Auflagerkraft gewählt. Bei der Wahl der Wägezelle ist eine sehr große Messgenauigkeit von Bedeutung, um Störeinflüsse zu minimieren.
Aktuator
Als Aktuator am anderen Auflager wird ein Schrittmotor mit Linearachse gewählt. Die daran angeschlossene Steuerkarte verarbeitet die eingehenden Signale aus der Steuerung des Gesamtsystems und setzt diese in rechts- oder linksdrehenden Motorschritte mit verschiedenen Geschwindigkeiten um. Schrittmotoren sind in der Programmierung einfach zu steuern und anhand der ausgeführten Schritte ist eine sehr genaue Positionskontrolle möglich. Nachteilig ist ihr ruckartiges Anfahrverhalten. Dieses kann jedoch durch Programmierung von Anfahrtsrampen minimiert werden.
Mikrokontroller
Für die Steuerung des Gesamtsystems wurde ein Mikrocontroller genutzt. In voneinander unabhängigen Prozessen wird einerseits die Fahrt der Last gesteuert, zum anderen ermittelt der Prozessor anhand der eingehenden Signale aus dem Kraftmesser die Lage der Last und steuert abhängig von dieser den Aktuator. Das Programm erfasst hierbei die Eingangsspannung am Controller mit einer Frequenz von 10 MHz und ermittelt aus 10 Messungen einen Mittelwert. Somit könnten eventuell auftretende Störeinflüsse aus Schwingungen minimiert werden.
Betrieb
Zunächst muss das System für die Inbetriebnahme initialisiert werden. Hierfür wird die Last in der Mitte des Trägers aufgestellt und das System gestartet. Das Programm schaltet die Stromzufuhr zu den Schienen auf Fahrt in Richtung des beweglichen Auflagers bis die Lichtschranke an diesem Lager auf den Reflektor, der an der Unterseite der Lokomotive angebracht ist, reagiert. Die Stromzufuhr zu den Schienen wird gestoppt, und der zweite Teil der Initialisierungsphase wird begonnen. Der Messverstärker der Wägezelle erhält ein Signal zum Nullabgleich. Anschließend wird der Schrittmotor so angesteuert, dass der Schlitten des Linearantriebs zunächst aus dem Bereich des induktiven Näherungsschalters heraus und anschließend bis zum ersten Signal des Näherungsschalters wieder hineinfährt. Damit ist die Initialisierung abgeschlossen und der Träger im Bereich der Auflager horizontal eingestellt.